Inertia, Nutation Frequency, and Precession
This experiment investigates the design and implementation of PID control for gyroscope control to create a stabilized feedback system to accurately position mass/inertia at a specified location and time.
The goal of this lab is to control the response of a gyroscope to a voltage step input under differing axes of freedom, determined by which DOFs are constrained, with different position outputs measured. For each experiment, the open-loop response of the gyroscope was first measured and used to create a model representing the response. Once the model was validated, a controller was designed around it before being tested on the actual gyroscope.
The ideal design of controller implementation in this experiment is set to contain these qualities: (1) Robustness; (2) Overshoot is limited within 25%; (3) No steady state error; (4) Disturbance rejection.
Tuning the controller gains to meet the requirements of the experiment consists of making small adjustments to each gain, prioritizing reducing steady-state error and reducing overshoot while reducing the rise time if possible. Since each gain affects the controller differently, this is an iterative process performed until the changes lead to diminishing returns.
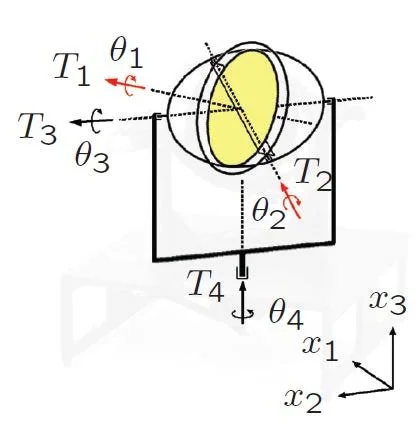
free body diagram of the gyroscope system
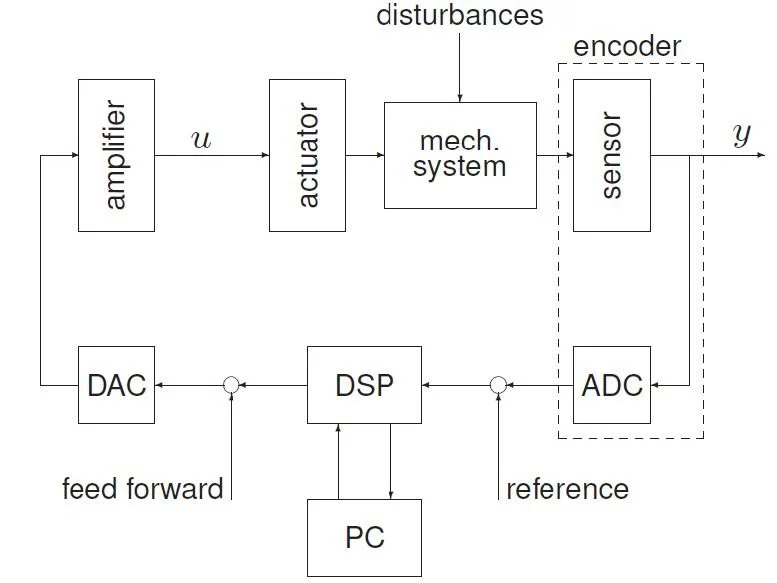
Apparatus
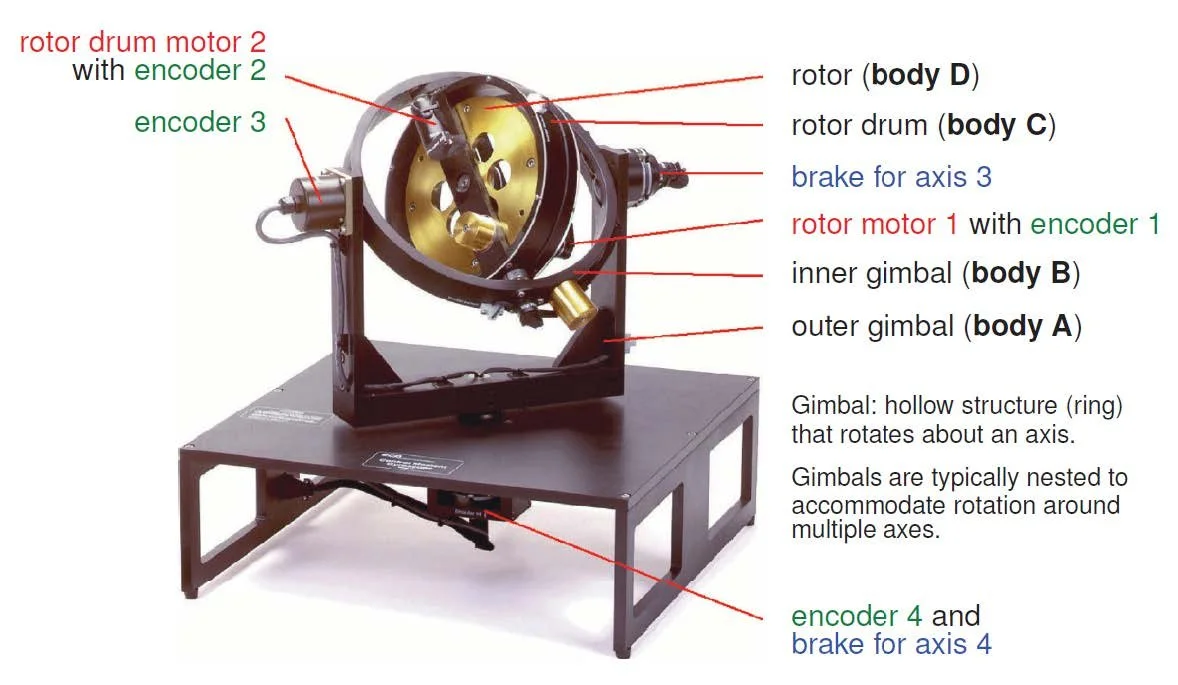
Gyroscope
Components of Gyroscope System
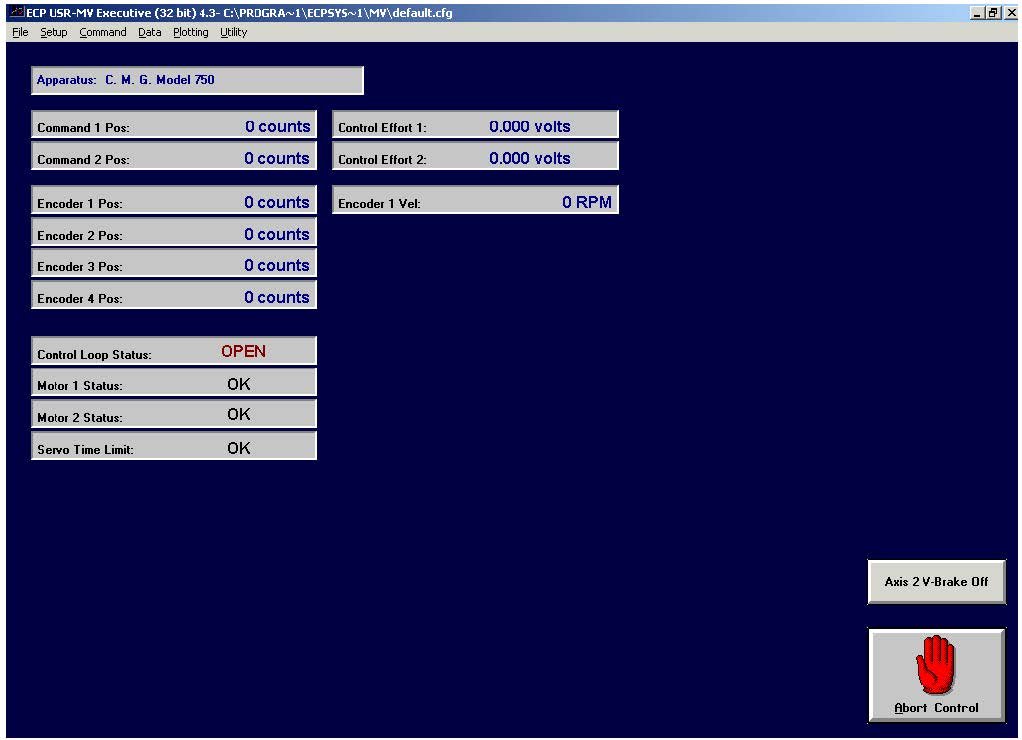
ECP main window
Inertial Control
For the first experiment of inertial control the input is motor 1 and the output is θ3 with brake 4 and virtual brake 2 on. The transfer function is
with scaling K0 and damping β0 .
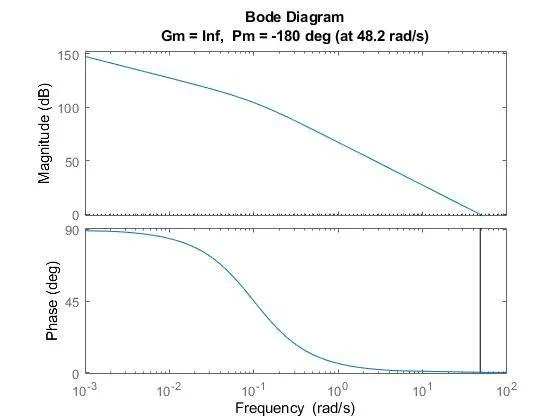
Bode diagram and phase margin with 𝐾=−2320 and β=0. 3
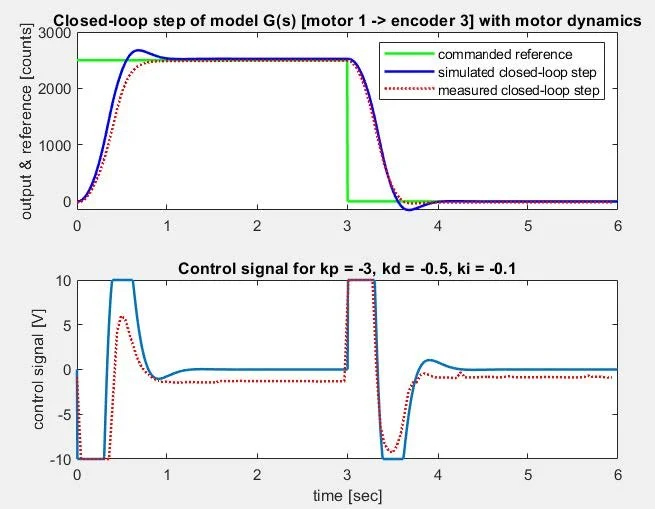
closed-loop controller of model 𝐺31(𝑠)
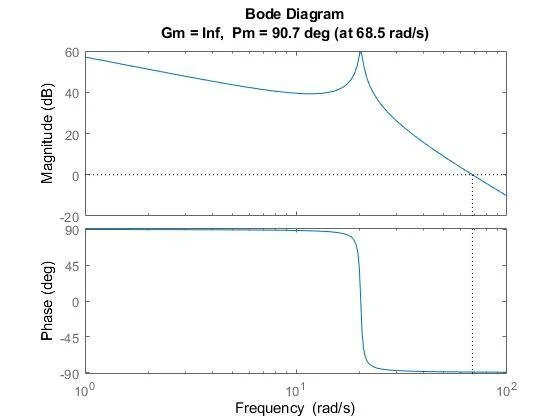
Nutation Frequency Control
For the second experiment of nutation frequency control, the input is motor 2 and the output is θ2 with brake 3 on and ω1 = Ω. The transfer function is
with scaling K1 and damping β and nutation frequency ω𝑛.

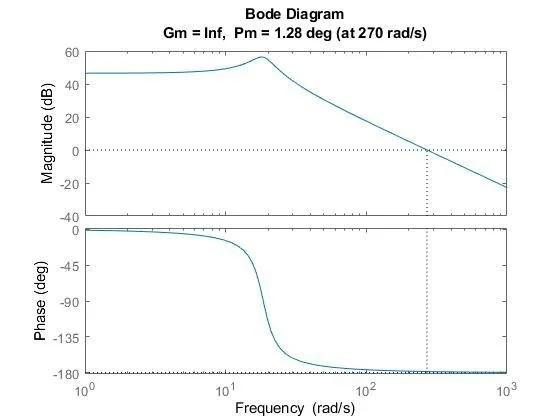
Bode diagram and phase margin with 𝐾 = 203. 04, ω𝑛 = 18. 369, and β = 0. 098
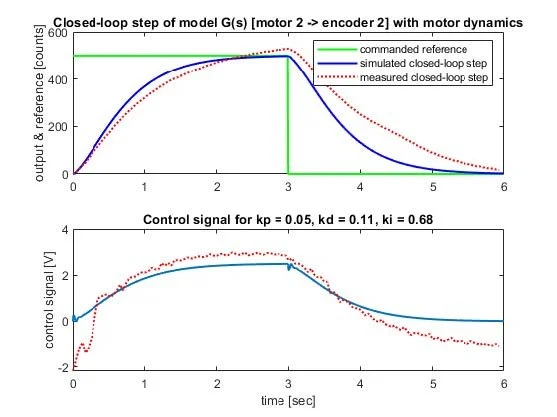
closed-loop controller of model 𝐺22(𝑠)
Precession Control
For the third experiment of precession control, the input is motor 2 and the output is θ4 with brake 3 on and ω1 = Ω . The transfer function is
with scaling K2 and damping β and nutation frequency ω𝑛.

Bode diagram and phase margin with 𝐾 = -718.56, ω𝑛 = 20.27, and β = 0. 0144
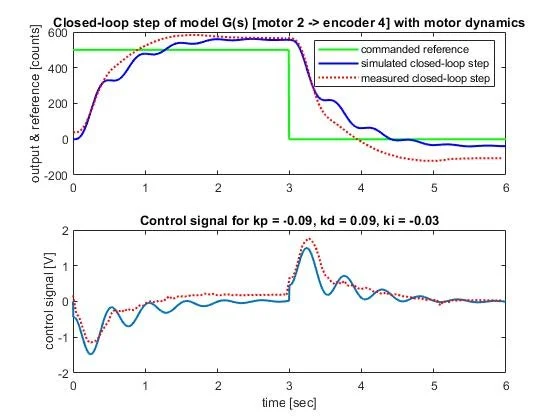
closed-loop controller of model 𝐺42(𝑠)